Currently I'm open to network for Full Time Roles starting from June, 2025. Please reach out to me through my email or linkedin. I'm a graduate student at the University of Pennsylvania and Robotics Software Engineer at the Autoware Foundation. My main current focus in on end to end autonomous driving with focus on perception, localization and mapping. If I'm not coding, I'm probably travelling, playing video games or watching comedy.
* links
* work

The Autoware Foundation
robotics software engineer (may 2024 - present)
Scaling end to end driving with Bird's eye view perception and improving localization with GNSS+IMU Fusion
Safe Autonomy lab
Research Assistant (jan 2024 - may 2024)
Worked on learning dynamics using Koopman framework. I was also involved in trajectory planning and full stack software for go-kart. Won First place in autonomous go-karting competition @ Purdue against universities like UC Berkeley, UCSD, UMich and more.

Banyan Intelligence
software engineer (jun 2022 - may 2023)
Built distributed Radio Access network simulator pipeline according to 3GPP standards which secured a deal with $2.8 billion company. Also developed a diagnostic tool for qualcomm SoC which got $1.2 million in funding.
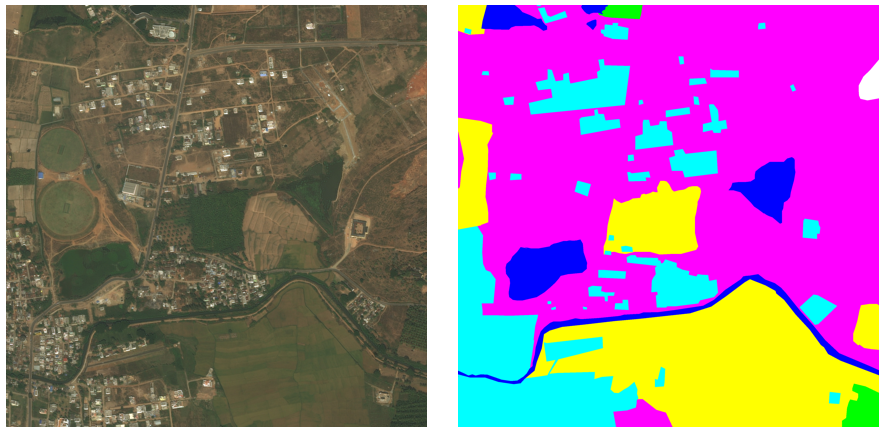
Centre for Robotics, Automation and Intelligent Systems
perception engineer (nov 2021 - feb 2022)
Developed semantic segmentation model to determine land cover on satellite images.
* projects
stereo-vo
Visual Odometry, Graph Optimization, Bundle Adjustment, G2O Solver, Optical Flow
Improved keyframes and landmarks pose with optimized sliding window bundle adjustment backend and achieved with inference time less than 0.02 seconds with optical flow tracking using Lucas-Kanade method.
tinySD3
Generative AI, Patch Variational AutoEncoder, Diffusion Transformer
Developed Diffusion transformer model by sampling from pretrained patchVAE latent space and improving FID score from 423 to 174 on CelebA dataset.
F1tenth Racing
Object detection, Motion Planning, RRT, Particle Filter, Hokuyo 2D Lidar, Nvidia Jetson NX, ROS2 Foxy
Designed full stack software for autonomous racing including perception, localization, planning and control.
humanoid SLAM
State Estimation, 2D SLAM, Particle filter
Integrated IMU and 2D LIDAR scan from THOR-OP humanoid robot to build occupancy grip map of indoor environment by performing particle filter based localization.
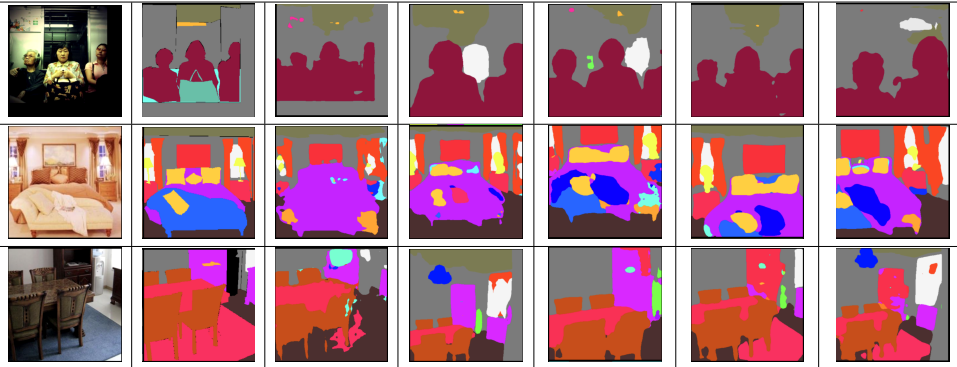
seg-distributed
Distributed Machine Learning, CUDA, AWS Cloud, Semantic Segmentation
Enhanced training process with 75 percent speedup using Distributed Data Parallel technique with 4 A30 Nvidia GPUs compared to Single GPU mixed precision training.
YOLO
Object detection, Pytorch Lightning, Image Processing
Implemented YOLOv1 pipeline from scratch in Pytorch to predict bounding boxes and achieved MAP of 0.41.
paint-anything
Generative AI, DNN Inference, Generative Adversarial Networks, Neural Style Transfer
Scripted Full Image to Image Translation Pipeline using CycleGAN to convert natural images to monet style paintings.
quad-UKF
IMU Calibration, Unscented Kalman Filter(UKF), Sensor Fusion
Implemented a Quaternion based Unscented Kalman filter to track 3D orientation from IMU data and compared it against ground truth data obtained from motion capture system.
SOLO
Instance Segmentation, Feature Pyramid Network
Optimized SOLO pipeline using Feature Pyramid Network COCO dataset.
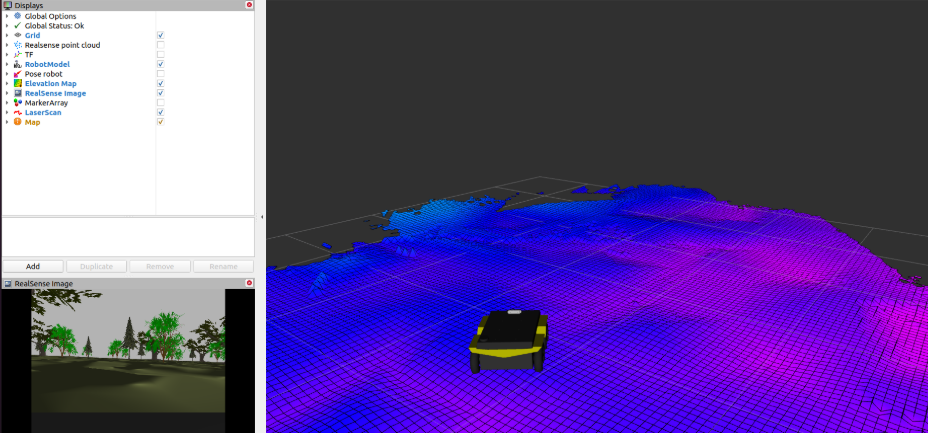
plant-terrain-robo
Data driven control, Elevation Mapping, Blender, Gazebo, ROS1 Noetic, Digital Twin
Acomplished the design of digital twin of coffee plantation using Blender and Gazebo and implemented elevation mapping for optimal input to planner.